بورد سنسور نقش اساسی در عملکرد ربات مسیریاب دارد. نحوه طراحی بورد سنسور و نحوه چینش سنسور ها و استحکام این بخش از ربات از اهمیت بالایی برخوردار است.
معمولا در طراحی بورد سنسور از قطعات زیر استفاده می شود:
- سنسور فرستنده مادون قرمز (LED)
- سنسور گیرنده مادون قرمز
- مقاومت
- سوکت IDC
البته استفاده از برخی قطعات مانند سوکت IDC سلیقه ای بوده و شما می توانید از سوکت های دیگر استفاده کنید. همچنین قطعاتی مثل مقاومت و سنسور ها انواع مختلفی دارند که ظاهر متفاوت با عملکردی تقریبا یکسان دارند. در این پروژه سعی شده از مقاومت ها SMD استفاده شود تا جای کمتری در مدار اشغال کند و زیبایی مدار حفظ شود.
همچنین انواع سنسور های مادون قرمز مانند TCRT و CNY70 در بازار موجود است که ظاهر و عملکرد تقریبا متفاوتی دارند اما هدف طراحی همه آن ها یک چیز است و آن تشخیص مقدار بازتاب نور از سطح می باشد. در این پروژه ترجیح داده ایم از سنسور های مادون قرمز معمولی کوچک 3 میلی متری استفاده کنیم که هم قیمت مناسب دارند و هم عملکرد مطلوبی را ارائه می دهند.
حال برای شروع، مدار ساده زیر را در نظر می گیریم:
قسمت Vcc مربوط به بخش تغذیه مدار و به معنی ولتاژ مثبت مدار می باشد. Vcc در اکثر مدار های دیجیتال دارای ولتاژ 5 ولت می باشد. بطور کلی Vcc باید یک ولتاژ صاف و پایدار داشته باشد تا پردازش صحیح و دقیق انجام شود.
تشریح مدار بخش سنسور فرستنده
سنسور فرستنده مادون قرمز که در نقشه بالا با نام IR مشخص شده نوعی LED یا دیود نوری با نور مادون قرمز یا Infra Red می باشد. این سنسور را با نام سنسور فرستنده معمولی مادون قرمز با سایز 3 میلی متر می توان خریداری کرد.
مقاومت R1 نقش تنظیم جریان و ولتاژ با هدف آسیب ندیدن سنسور فرستنده را در مدار ایفا می کند. همچنین با تغییرات جزئی مقدار مقاومت مذکور، می توان شدت نور سنسور فرستنده را تنظیم کرد. شدت نور فرستنده اگر از یک حدی بیشتر باشد حتی از رنگ های سیاه هم بازتاب می کند و حتی ممکن است رنگ سیاه را هم سفید تشخیص دهد. و اگر شدت نور از یک حدی کمتر باشد ممکن است حتی از رنگ سفید هم بازتاب کافی نداشته باشد. بنابراین ابتدا با استفاده از فرمول قانون اهم مقدار تقریبی مقاومت محاسبه گردید و سپس با آزمایش و خطا مقدار دقیق و ایده آل مقاومت بدست آمد تا نور تولید شده توسط سنسور نه بیش از حد زیاد باشد و نه کم.

در این ربات برای تمامی مقاومت های سنسور های فرستنده از پکیج SMD سایز 1206 استفاده شده است. پکیج های SMD سایز کوچک تری دارند و فضای کمتری اشغال می کنند همچنین برای مونتاژ قطعات SMD به سوراخ کردن فیبر مدار نیاز نیست.
در نهایت برای جمع بندی این بخش از مدار در نظر داشته باشید که جریان با ولتاژ 5 ولت از Vcc داخل مدار می شود با عبور از مقاومت از شدت جریان و قدرت ولتاژ آن کاسته می شود. در نهایت جریان از LED فرستنده مادون قرمز عبور کرده و آن را روشن می کند و از طریق GND به منبع تغذیه باز می گردد.
تشریح مدار بخش سنسور گیرنده
در نقشه مذکور S نيز سنسور گيرنده مادون قرمز مي باشد. این نوع سنسور نیز ظاهری شبیه به LED و کارکردی شبیه به مقاومت متغیر دارد. به طوری که هر چه نور مادون قرمز بیشتر به سنسور برسد رسانایی سنسور افزایش پیدا کرده و مقاومت آن در برابر عبور جریان کمتر می شود.
به طور خلاصه، اگر سنسور هاى ما بر روى رنگ سیاه قرار بگيرد (به دليل جذب زیاد نور و بازتاب کم آن) اشعه مادون قرمز ارسالى از سنسور فرستنده جذب رنگ سياه شده و بازتاب نور ناچیز خواهد بود و در نتيجه به سنسور S هم اشعه مادون قرمز بسیار کم خواهد رسید و با افزایش مقاومت سنسور، جريان عبوری از سنسور کم خواهد بود و در نتيجه ولتاژ SS افزايش مى يابد و به مقدار Vcc نزدیک می شود.
اما هنگامى كه سنسور هاى ما از رنگ سفيد عبور مى كنند (به دليل جذب كم وبازتاب زياد) اشعه مادون قرمز ارسالى به سنسور گيرنده رسيده و مقامتش كاهش مى يابد و در نتيجه جريان شروع به عبور از سنسور مى كند ودر نتيجه ولتاژ SS كاهش مى يابد و به صفر مى رسد.
R2 هاى مورد استفاده در این مدار نقش پول آپ(pull up) را دارند. یعنی در حالتی که مقاومت سنسور گیرنده کاهش می یابد و جریان به سمت قطب منفی مدار حرکت می کند، وجود مقاومت باعث می شود که قسمت Vcc (قطب مثبت) مستقیماً به GND (قطب منفی)متصل نشود.اما در حالتی که مقاومت سنسور گیرنده افزایش پیدا کرده و اجازه عبور بار ازقسمت GND به منبع تغذیه توسط سنسور گیرنده داده نمی شود و مقاومت مورد نظر نقش خاصی ایفا نکرده و ولتاژ 5v به دلیل عدم وجود مصرف کننده در مدار به طور کامل به SS خواهد رسید.
اساس کار مدار در شکلی که در ابتدای این آموزش مشاهده کردید به اینگونه است که ابتدا هر دو مدار ولتاژ 5v را از Vcc مى گيرد،در مدار سمت چپ ولتاژ 5v پس از عبور از مقاومت افت پيدا كرده و ولتاژ مد نظر براى ارسال نور فرستنده IR را فراهم مى سازد.اما در مدار سمت راست دو حالت براى سنسور گيرنده اتفاق مى افتد،در حالت اول نور ارسالی ما به قسمت سیاه زمین برخورد کرده،و پس از برخورد جذب آن شده و هیچ نوری به سنسور گیرنده نخواهد رسید در نتیجه مقاومت سنسور گیرنده کاهش یافته و به سمت صفر میل خواهد کرد و با توجه به اینکه گیرنده به زمین وصل است در نتیجه همه ی جریان را در زمین تخلیه خواهد کرد و ولتاژ صفر به SS خواهد رسید.اما در حالت دوم نور ارسالی به قسمت سفید برخورد کرده و بازتاب پیدا می کند در نتیجه این بازتاب، مقاومت سنسور S افزایش پیدا کرده و اجازه عبور جریان از خود را نمی دهد و ولتاژ SS افزایش پیدا خواهد کرد و ولتاژ 5v به SS خواهد رسید.
مداری که ما طراحی خواهیم کرد از ۲۴ سنسور تشکیل خواهد شد. هر چه تعداد سنسور ها افزایش یابد میزان خطای ربات مسیریاب کاهش خواهد یافت و عملکرد بهتری خواهد داشت.
خروجی همه ی سنسور ها ( SS ) به پورت IDC متصل است یعنی ولتاژ 5v یا 0v از این طریق به بورد اصلی انتقال خواهد یافت. تصویر زیر شماتیک پورت IDC را نشان می دهد:
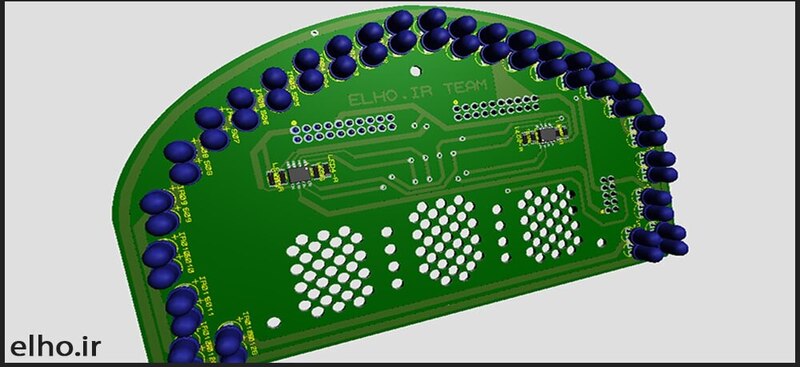
تصویر زیر هم نمایی سه بعدی از بورد سنسور میباشد:
همانطور که گفته شد دو تصویر بالا نمای سه بعدی از بورد سنسور ربات مسیر یاب ما می باشد که قسمت های مختلف آ ن به شرح زیر می باشد؛
– قسمت 1 مشخص شده در هر دو تصویر،مربوط به پورت IDC ما می باشد.
– قسمت 2 مشخص شده در تصویر اول مقاومت سنسور فرستنده است،مقاومت مربوط به سنسور گیرنده نیز در بورد اصلی قرار خواهد گرفت.
– قسمت 3 در هر دو تصویر مربوط به سنسور فرستنده است.
– قسمت 4 نیز در هر دو تصویر مربوط به سنسور گیرنده است.
شکلی که در بالا مشاهده می کنید PCB مداری است که آنرا تشریح کردیم با این تفاوت که در این مدار مقاومت سنسور گیرنده به بورد اصلی انتقال یافته است. در شکل زیر قسمت 1، محل قرار گیری این مقاومت در بورد اصلی نشان داده شده است:
نام قطعات مشخص شده در این قسمت1،Resistor Pack می باشد که هر کدام از آنها دارای هشت مقاومت 4.7k اهم می باشد که همه ی آنها به صورت موازی به ولتاژ Vcc متصل شده اند.
شکل بالا اساس کار بورد سنسور را کاملا نمایان می سازد به گونه ای که ولتاژ Vcc از هر دو طرف به مدار اعمال می شود،مقاومت سمت چپ همانطور که گفته شد فقط برای عدم اتصال مستقیم قطب مثبت به قطب منفی در حالتی که مقاوت سنسور گیرنده کاهش یافته است در مدار به گرفته شده است اما مقاومت سمت راست صرفا جهت جلوگیری از رسیدن ولتاژ اضافی و آسیب به سنسور فرستنده، در مدار قرار گرفته است.
حال دو حالتی که در سنسور گیرنده اتفاق می افتد را بررسی می کنیم ؛ در حالت اول که سنسور ها روی مسیر سیاه رنگ قرار دارند و نوری به سنسور گیرنده نمی رسد و در نتیجه آن مقاومت سنسور گیرنده افزایش می یابد و ولتاژ Vcc برروی Buffer خواهد افتاد. اما در حالت دوم که سنسور ها برروی مسیر سفید رنگ قرار دارند، بازتاب نور از سطح و رسیدن به سنسور گیرنده باعث کاهش مقاومت سنسور گیرنده شده و ولتاژ Vcc از طریق قطب منفی به منبع تغذیه خواهد برگشت.قسمت IDC موجود در این مدار نیز سیم رابط بین بورد سنسور و بور اصلی می باشد








دیدگاهتان را بنویسید