دسته: دوره آموزشی ربات مسیریاب
-

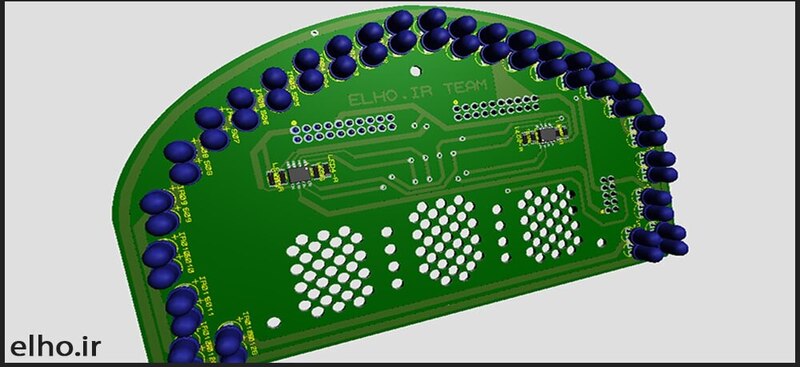
جلسه LF,3.7 : مین بورد
5برای شروع طراحی شماتیک مین بورد بهتر است ترتیبی را که در زیر مطابق آن پیش می رویم را رعایت کنید. سوکت IDC؛ ابتدا از سوکت IDC شروع می کنیم.همانطور که در سنسوربورد اشاره شد،برای اضافه کردن سوکت IDC در قسمت keywords،عبارت(019-10063456)راتایپ کرده و آنرا انتخاب کنید.دو عدد سوکت IDC را در صفحه ی کار…
-

جلسه LF,3.6 : طراحی بخش شماتیک بورد اصلی
پس از رسم شماتیک مدار بورد سنسور، نوبت به رسم شماتیک بورد اصلی می رسد.
-

جلسه LF,3.4 : طراحی شماتیک و PCB در پروتئوس
براى طراحى شماتيك و PCB ربات مسيرياب نرم افزارهاى گوناگونى موجود است كه ما در طول تمام آموزش ها از نرم افزار پروتئوس (Proteus) كمك مي گيريم. پروتئوس نرم افزارى كاربردى جهت طراحى مدارات مي باشد. در واقع پروتئوس يكى از نرم افزارهاى مطرح در زمينه شبيه سازى و تست مدارات الكترونيك مى باشد. از…
-

جلسه LF,3.5 : طراحی بخش شماتیک بورد سنسور
در بخش های قبلی ما ارتباط قسمت های مختلف ربات مسیریاب را مورد بررسی قرار دادیم. حال برای فهم بهتر و پیاده سازی بهتر ایده های مان بهتر است از شماتیک مدار مورد نظر کمک بگیریم. برای رسم شماتیک مدار، ما می توان از برنامه های مختلفی مانندAltium desinger،proteus،Ez schematics و … استفاده کرد، که…
-

جلسه LF,3.3 : بررسی مدار بخش بورد اصلی
بورد اصلی یا Main board اصلی ترین بخش ربات مسیریاب ما می باشد که وظیفه ی ان دریافت اطلاعات از سنسور ها، پردازش اطلاعات و در نهایت کنترل موتور ها می باشد. بخش های مختلف مین بوردرا میتوان به صورت زیر تقسیم کرد: 1- بخش دریافت اطلاعت آنالوگ از سنسورها و تبدیل آن به دیجیتال…
-

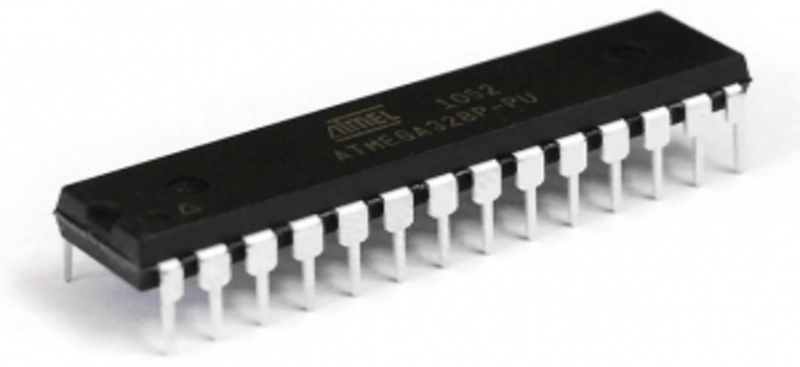
جلسه LF,3.2
در این بخش قصد داریم شما را با چند قطعه ی مهم دیگر از ربات مسیریاب آشنا کنیم. به خاطر اینک این قطعات ساختار و کاربردی ساده دارند تصمیم گرفتیم به جای معرفی هر قطعه در بخش های جداگانه همه آن ها را در یک بخش معرفی کنیم. این قطعات عبارتند از: 1- IC و…
-
جلسه LF,3.2 : بررسی مدار بخش بورد سنسور
بورد سنسور نقش اساسی در عملکرد ربات مسیریاب دارد. نحوه طراحی بورد سنسور و نحوه چینش سنسور ها و استحکام این بخش از ربات از اهمیت بالایی برخوردار است. معمولا در طراحی بورد سنسور از قطعات زیر استفاده می شود: سنسور فرستنده مادون قرمز (LED) سنسور گیرنده مادون قرمز مقاومت سوکت IDC البته استفاده از…
-
جلسه LF,3.1 : مقدمه ای بر طراحی مدار ربات مسیریاب
براى طراحى شماتيك و PCB ربات مسيرياب نرم افزارهاى گوناگونى موجود است كه ما در طول تمام آموزش ها از نرم افزار پروتئوس (Proteus) كمك مي گيريم. پروتئوس نرم افزارى كاربردى جهت طراحى مدارات مي باشد. در واقع پروتئوس يكى از نرم افزارهاى مطرح در زمينه شبيه سازى و تست مدارات الكترونيك مى باشد. از…
-

جلسه LF,2.3
در بخش قبلی با نحوه ی کار سنسور های مادون قرمز به طور کامل آشنا شدید. فهمیدیم که سنسور ها اگر بالای یک سطح سیاه قرار بگیرند ولتاژ خروجی 5 و اگر روی یک سطح سفید قرار بگیرند ولتاژ خروجی 0 خواهد بود. اما همانطور که قبلا هم متذکز شدیم باید بدانید این ولتاژ خروجی…
-

جلسه LF,2.2 : سنسور مادون قرمز و کاربرد آن در ربات مسیریاب
دوره آموزشی ربات مسیریاب ، فصل 2 : قطعات ربات مسیریاب ، جلسه 2 : سنسور مادون قرمز و کاربرد آن در ربات مسیریاب